Otto DIY スターターキットを組み立てる(2) サーボモーターを取り付ける
これは 「Otto DIY スターターキットを組み立てる(1) パーツの確認」の続きの記事です。いよいよロボットを組み上げていきます。
オプションだけど推奨。前準備、サーボモーターのセンター 出し
今回利用するサーボモーターは180度回転するサーボで、そのセンターの位置で Otto は直立の姿勢を取ることで正しく動作できるよう設計されています。同梱のサーボモーターは開封時点でどの角度位置にいるか特定できないので、適当に取り付けると、関節が変な方向に向いてしまう可能性があります。このようにならないようにするためにサーボは組み上げる前に中心、90度の位置で回転位置をそろえておきます。Otto DIY 公式マニュアルでは、ロボットを組み上げる途中でサーボを手で動かし中心を求める方法を示していますが、実際行ってみるとギアがかんで、手ではなかなか動かせなくなる状況が頻繁に起こりました。無理やり手で動かしてサーボを破損させないためにも、あらかじめソフトウェア制御にてセンター出しを行っておくことをお勧めします。
参考 => 「Otto DIY スターターキット サーボモーターのセンター出しをする」
サーボモーターを取り付ける
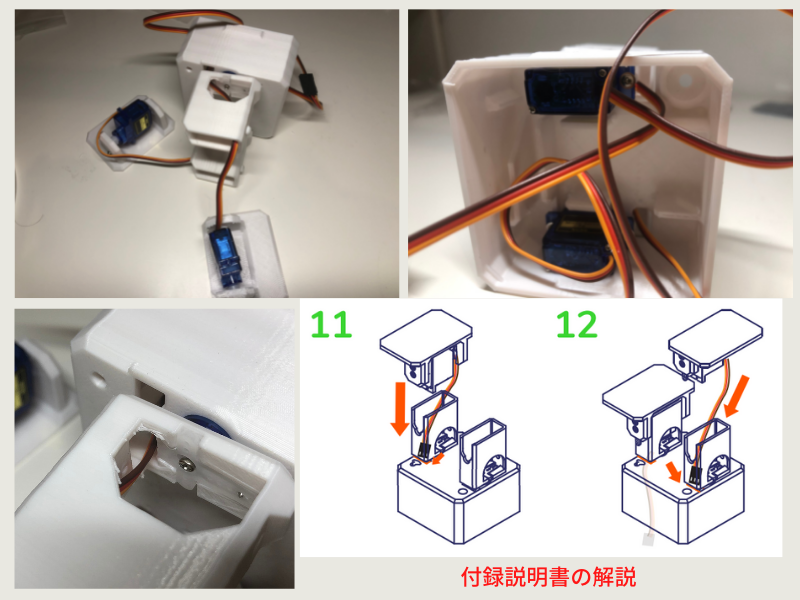
まずサーボモーター2つをボディーに取り付けます。
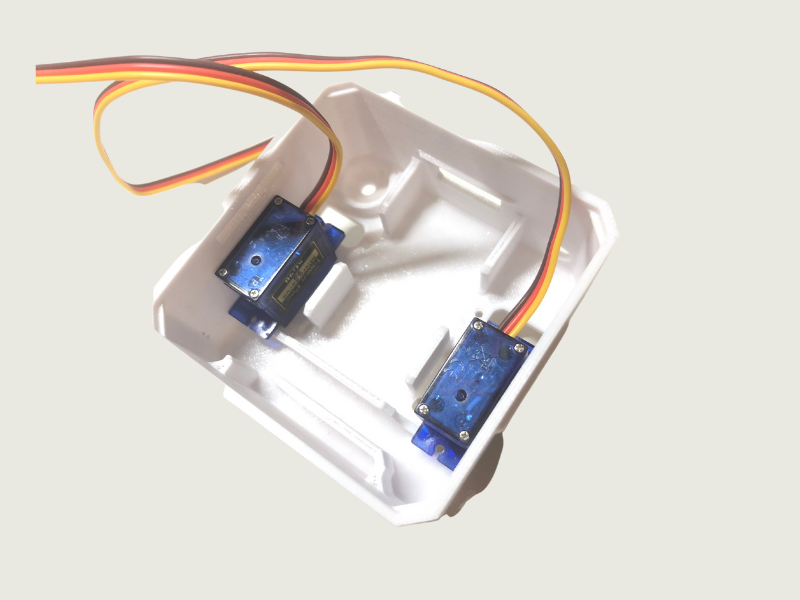
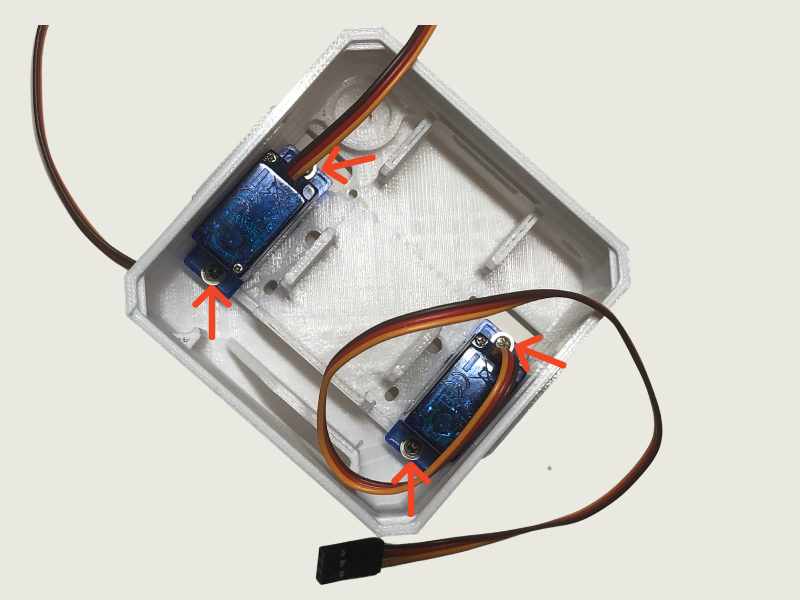
サーボモーターの凸の位置がボディーの穴と合うように取り付けます。裏から見るとこのような状態です。

サーボモーターの袋に入っている木ネジでサーボをボディーに固定します。
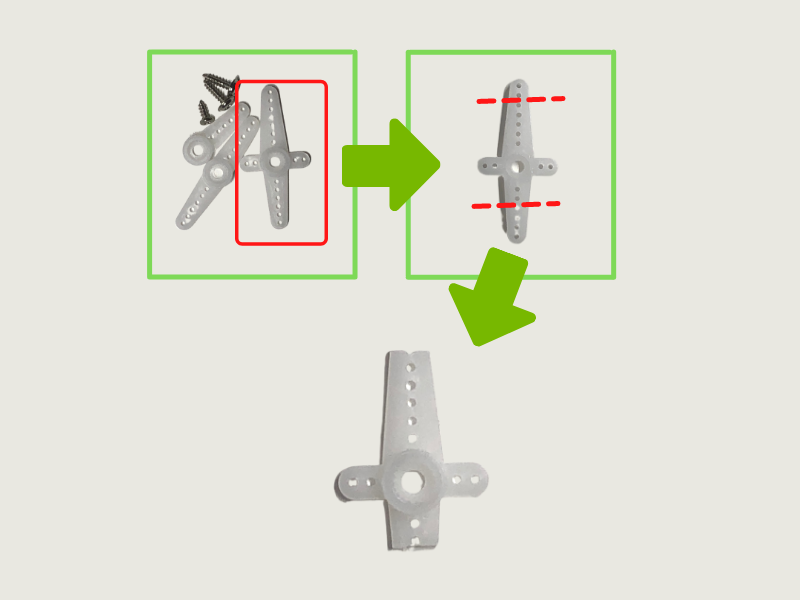
足のパーツに取り付けるためのサーボホーンを次のように加工します。ハサミでもカットできますが、ニッパーのような工具があればそちらでカットした方が作業は効率的に行えるかと思います。
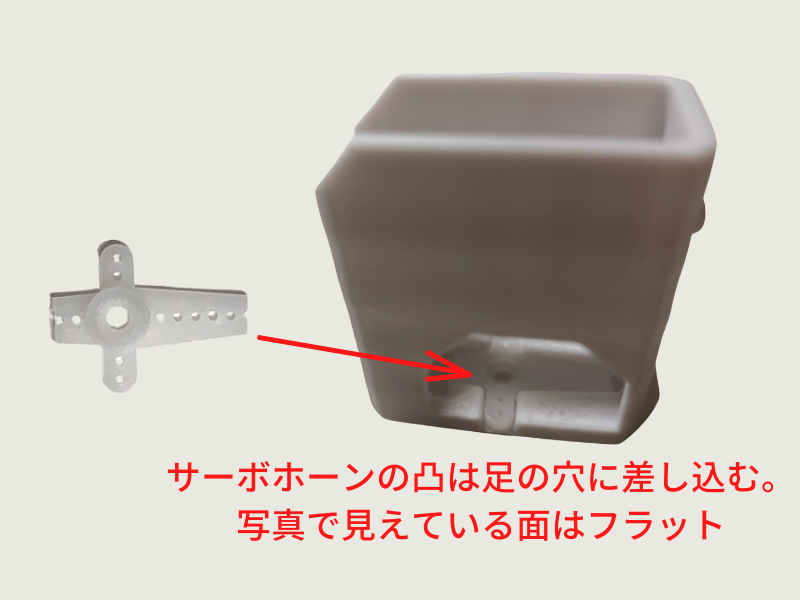
サーボホーンを足のパーツに取り付けます。以下写真の中でも記載の通り、サーボホーンの丸の部分の凸の面を足のパーツの穴に入れ込むような方向でサーボホーンのパーツを足のパーツにセットします。(メモ:キットに同梱されているサーボモーターとサーボホーンがこの足にベストマッチします。2021年12月時点で付録でつけている Tower Pro 製の予備サーボモーターはサーボホーンの中心の凸の部分の直径が少しだけ大きいです。このため、このサーボホーンを取り付けるには足のパーツの穴の部分を少しだけやすりなどで削って大きくしてあげる必要があります)
穴にキットに付属されていた木ネジを入れてドライバーで締めこみます。これによりサーボホーンの柄の部分と足のパーツとが固定されます。このセットを2つ作ります。

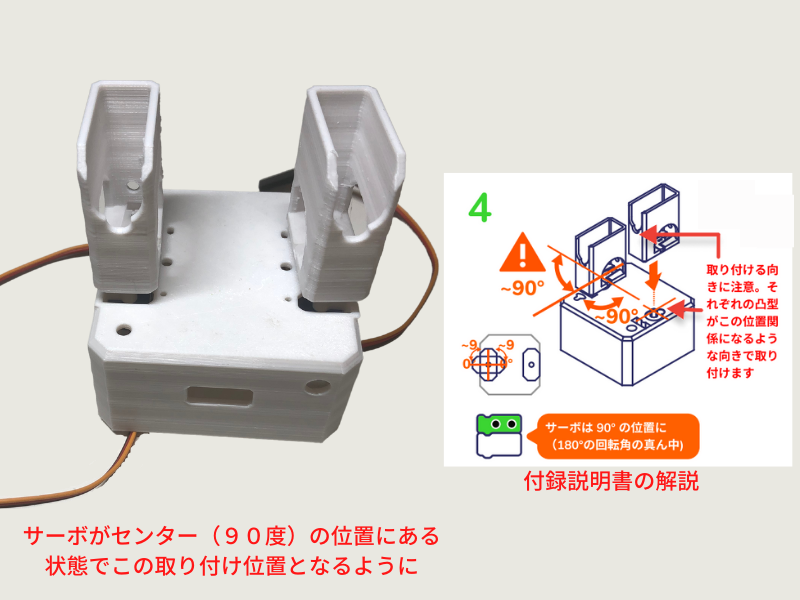
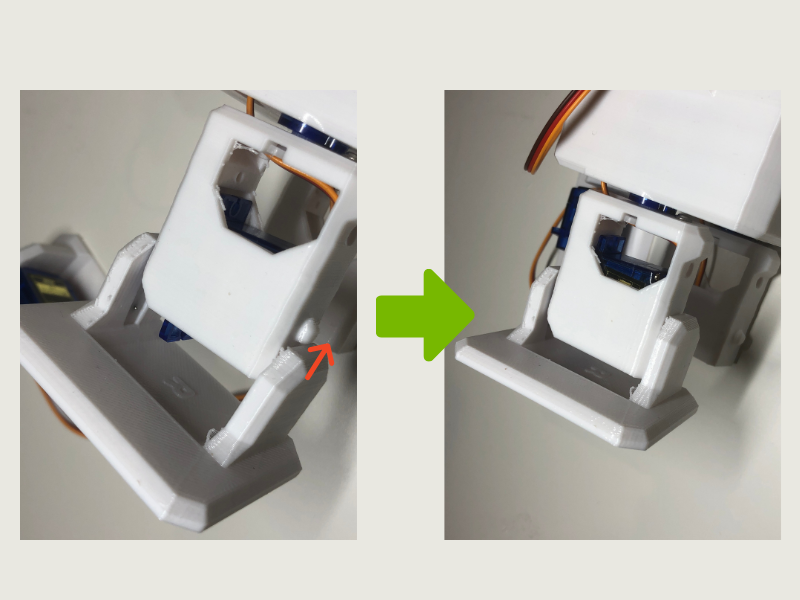
足のパーツをボディーにつけます。サーボモーターの軸に足のパーツに取り付けたサーボホーンの穴を差し込み、足をサーボモーターに固定します。固定の際、サーボモーターのセンター位置を下の図に示すような位置関係で合わせます。(あらかじめサーボモーターのセンター出しができていれば、位置関係に注意してそのままセットすれば OK ですが、センター出しをしていない場合、サーボを手で回しながらセンター位置を見つけます。手で無理やり動かしてギアを破損しないように気を付けてください。手で回すことでサーボモーターを破損しそうな感じでしたらいまからでも可能です、次を参考にソフトウェアでセンター出しをしてみてください 「Otto DIY スターターキット サーボモーターのセンター出しをする」)
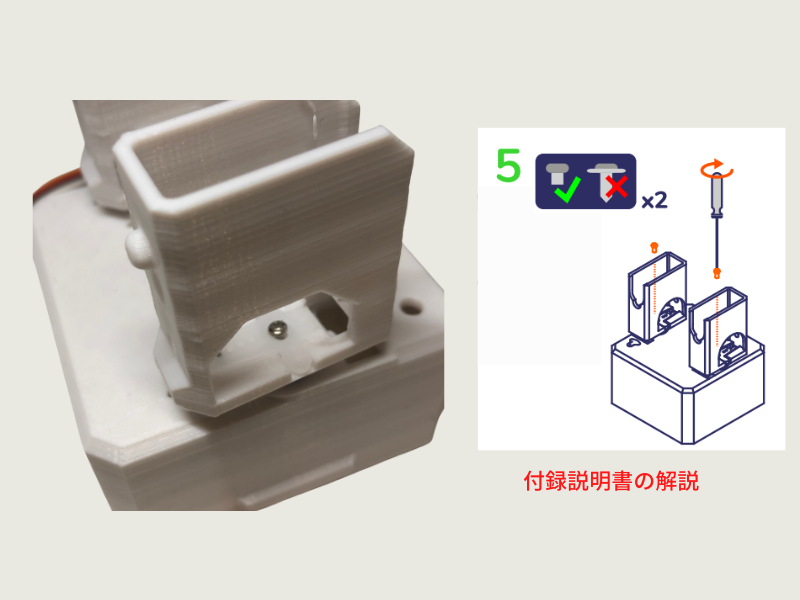
サーボモータの袋の中に入っていたネジを使ってねじ止めします。
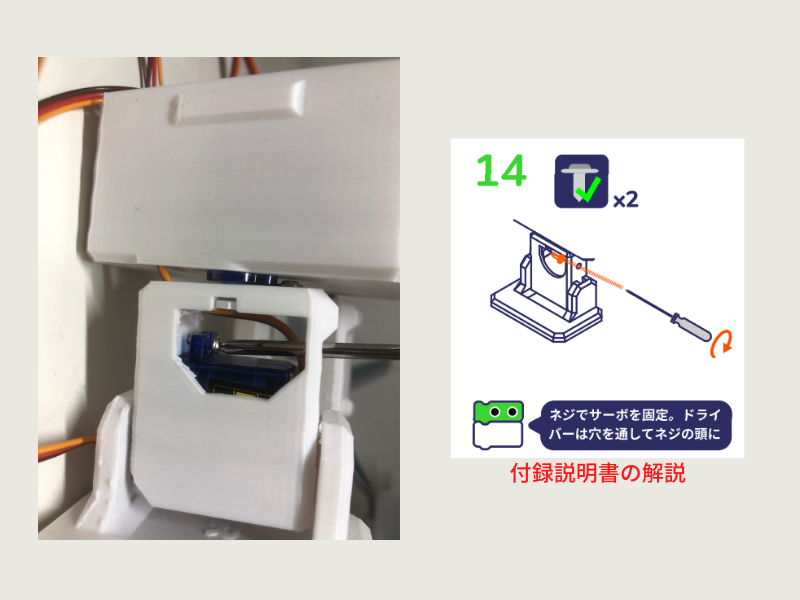
次に足のかかと部分のパーツを組み上げていきます。下の図の通り作業をします。ネジはキット付属のネジを使います。

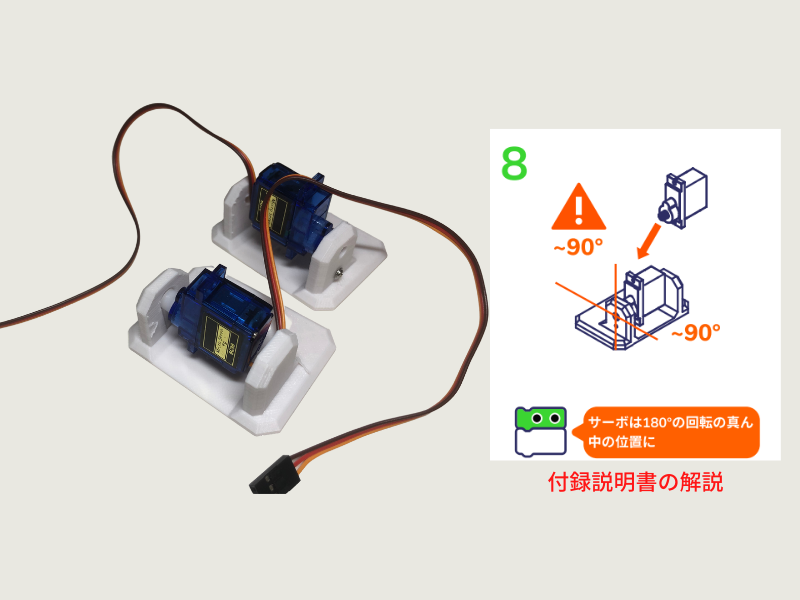
下の図のようにサーボモータを取り付けます。こちらもサーボモーターのセンターの位置を合わせてください。(先ほどと同様、あらかじめサーボモーターのセンター出しができていれば、位置関係に注意してそのままセットすれば OK ですが、センター出しをしていない場合、サーボを手で回しながらセンター位置を見つけます。手で無理やり動かしてギアを破損しないように気を付けながら作業します)
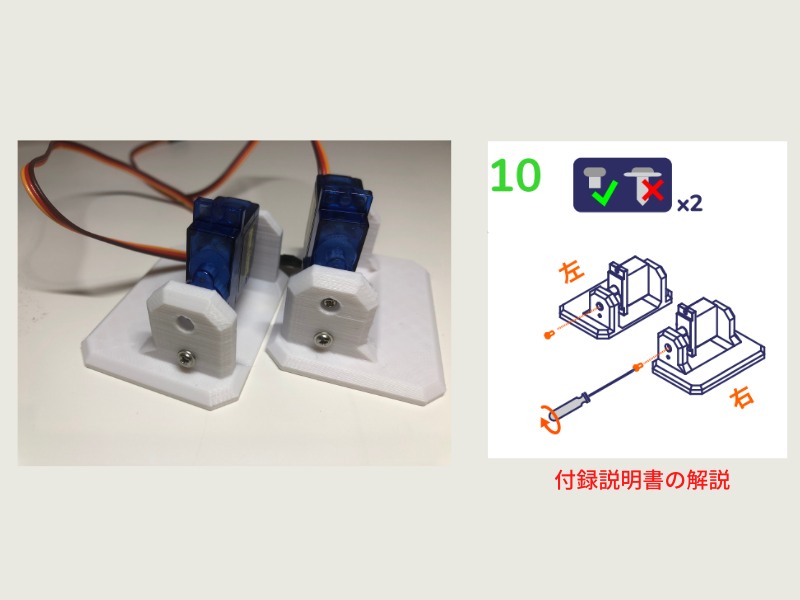
サーボモータの袋に入っていたネジでサーボをねじ止めします。
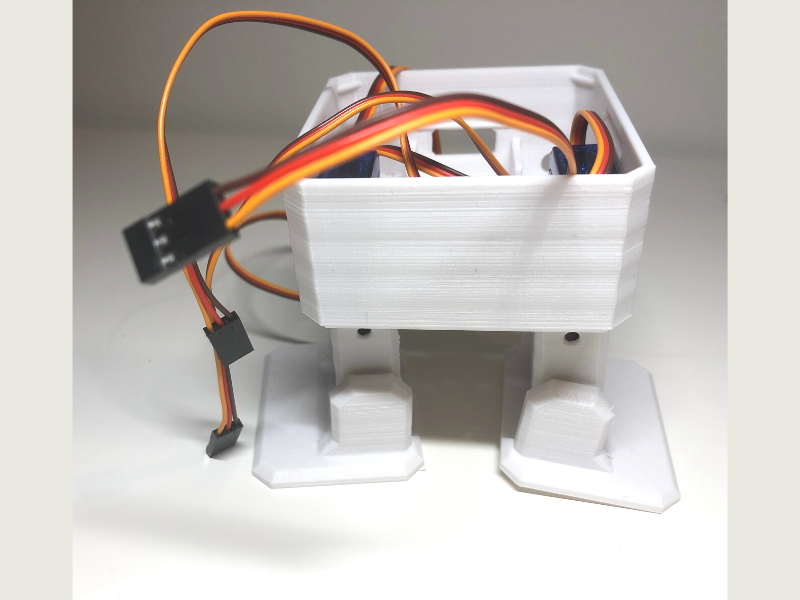
次の写真とイラストを参考に かかとに取り付けたサーボモーターから出ているケーブルを足のパーツの穴を通して、ボディーまで引き込みます。
かかとのパーツと足のパーツに組み込みます。少しかかとのパーツを押し広げて足のパーツに押し込み、足のパーツの凸の部分とつま先のパーツの凹の部分が合うようにします。
次のようにしてサーボモータの袋に付属されていた木ネジで、かかとのサーボモーターを足のパーツに固定します。結構指先の器用さが求められますが、ドライバーとネジは磁石でくっつくので、くっつけながらまずぜ時を取り付ける位置までネジを持って行って、ここに置いたのち穴からドライバーを通して固定していくような感じで作業すればうまく固定できるのではと思います。足のパーツのネジ穴の部分にちゃんとネジが入っていっているのを確認しながらネジを締めこんていってください。
お疲れ様です。以上でサーボモーターの取り付けは完了です。
次は電子パーツを取り付け、実際に動かせるようになるところまで見ていきたいと思います。
次回に続く => 「Otto DIY スターターキットを組み立てる(3) 電子パーツを組み込み完成させる」
Follow me!


“Otto DIY スターターキットを組み立てる(2) サーボモーターを取り付ける” に対して2件のコメントがあります。