Otto DIY 拡張セット「ヒューマノイド」を組み立てる
ここではOtto DIY ロボットの拡張セット「ヒューマノイド」の組み立てかたを確認していきます。
部品の確認
まずパッケージの中身を確認していきましょう。
まずは「エクスパンダー」これが Otto の頭と胴体の間に入ります。

「LEDホルダー」これの中に LED ディスプレイが入ります。
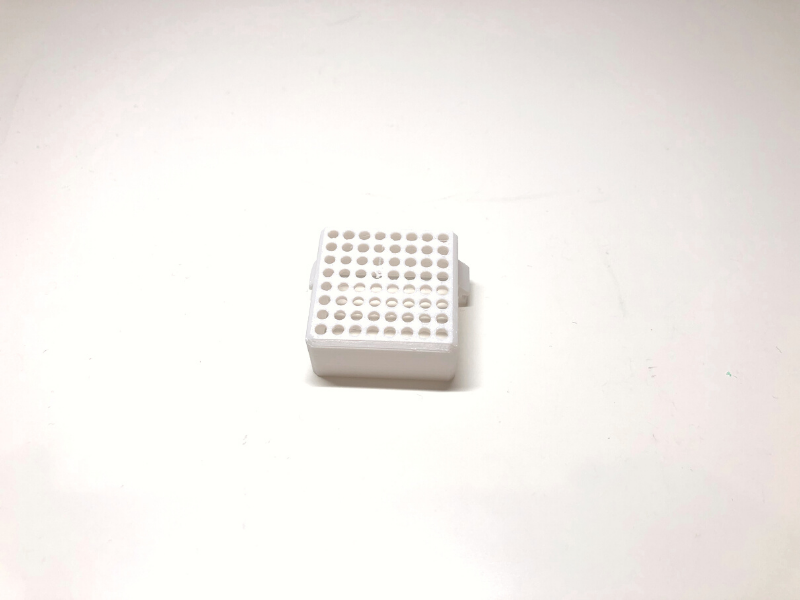
「LEDディスプレイ」です。8x8の LED が配置されており、それぞれを発光させて様々な表現ができます。

腕です。エクスパンダーにこの腕が取り付けられます。

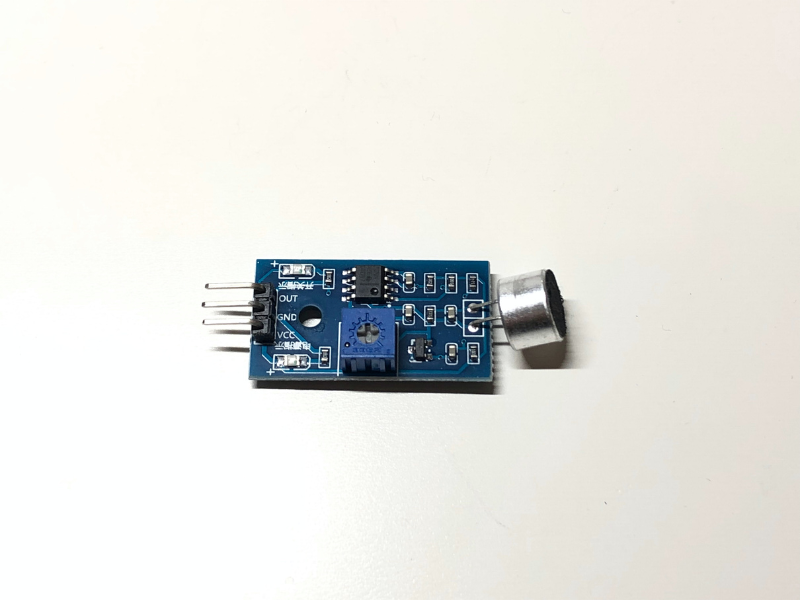
銀色の保護袋の中に入っているのは音センサーです。周辺の音の大きさに反応します。
サーボモーターが2個入っています。

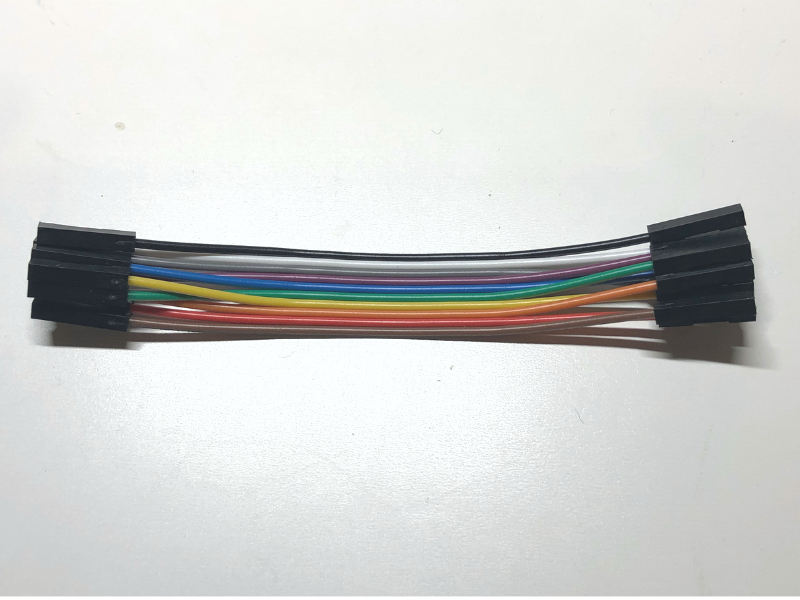
配線に必要なケーブル(ジャンパーケーブル)も入っていることを確認してください。
一通り部品を確認出来たら組み上げていきましょう。
ヒューマノイドを組み上げる
拡張セット「ヒューマノイド」は Otto DIY スターターキットに拡張をするパーツです。すでに完成したスターターキットに拡張パーツを取り付けていきます。このため、ここでは Otto DIY スターターキットが組みあがった状態からの手順を説明していきます。スターターキットの組み立てについては次を確認してください。「Otto DIY スターターキットを組み立てる(1) パーツの確認」

拡張セットは胴体と頭のパーツの間に取り付けます。スターターの頭を外します。
間にパーツを挟めるようにするため、サーボモーターの配線、電源の配線、ブザーの配線を外します。
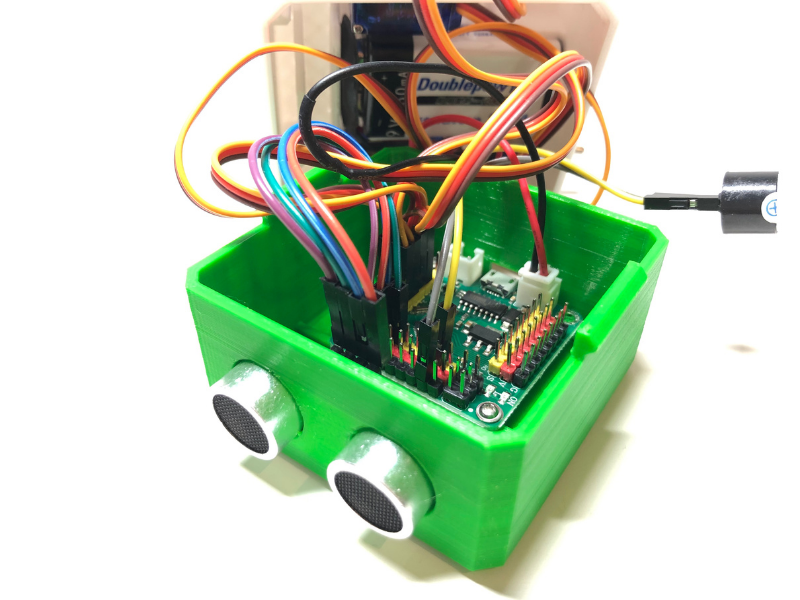
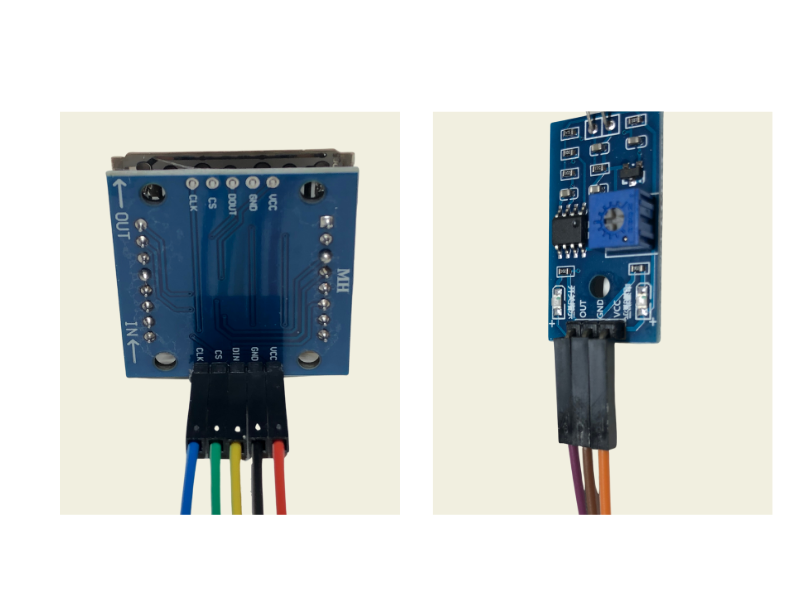
LEDディスプレイと音センサーの配線を準備します。それぞれのピンに配線用のケーブルを差します。配線の色は次の写真と完全に一致している必要はありませんが、どの信号線が何色かちゃんとわかるようにしておきます。
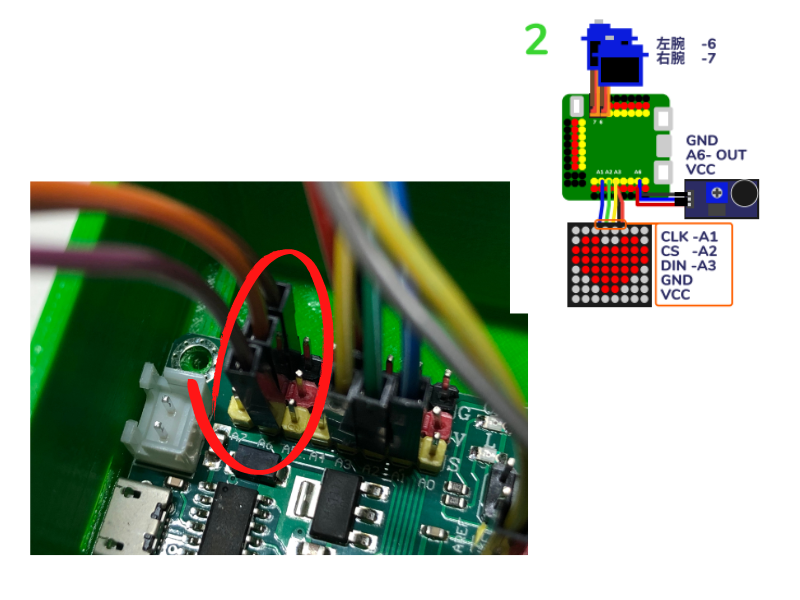
それぞれのケーブルを CPU ボードにさしていきます。LEDディスプレイは CLK, CS, DIN となっているそれぞれの信号線を CPU ボード A1, A2, A3 の黄色いラインのピンとつなげます。次に Vcc は A1ピンの赤いライン、GND は A1 ピンの黒いラインのピンとつなげます。
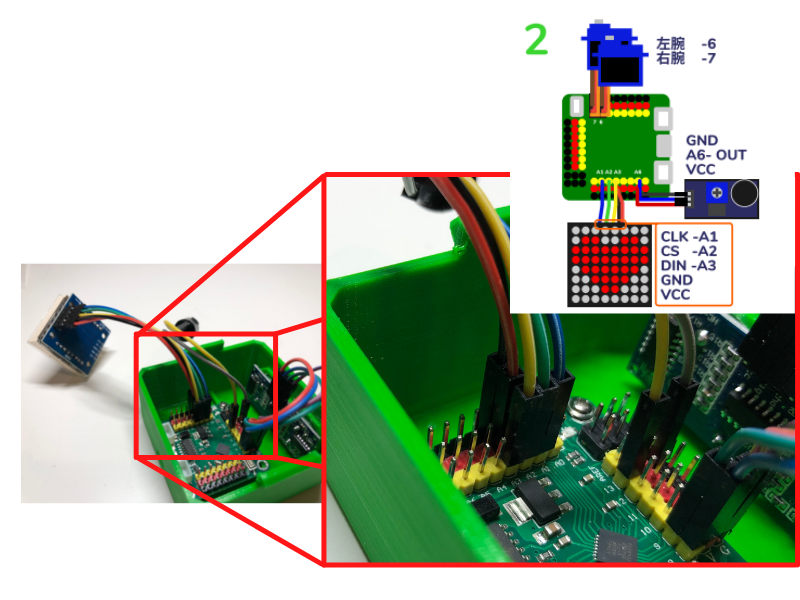
音センサーは Out となっている信号線を CPU ボードの A6 の黄色いラインに、VCC を同じ A6 の赤いライン、GND も同じ A6 で黒いラインのピンにつなげます。
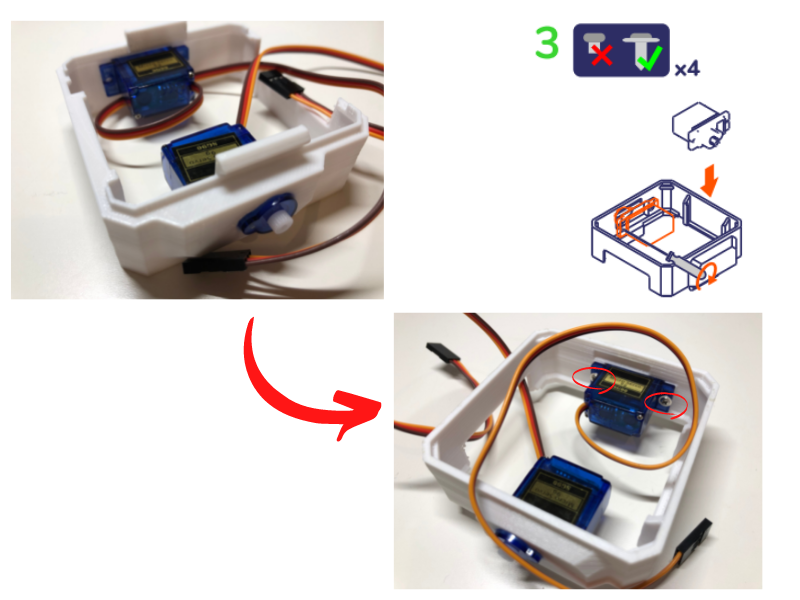
次にサーボモーターを取り付けていきましょう。エクスパンダーに次の通り取り付け、ネジで固定します。
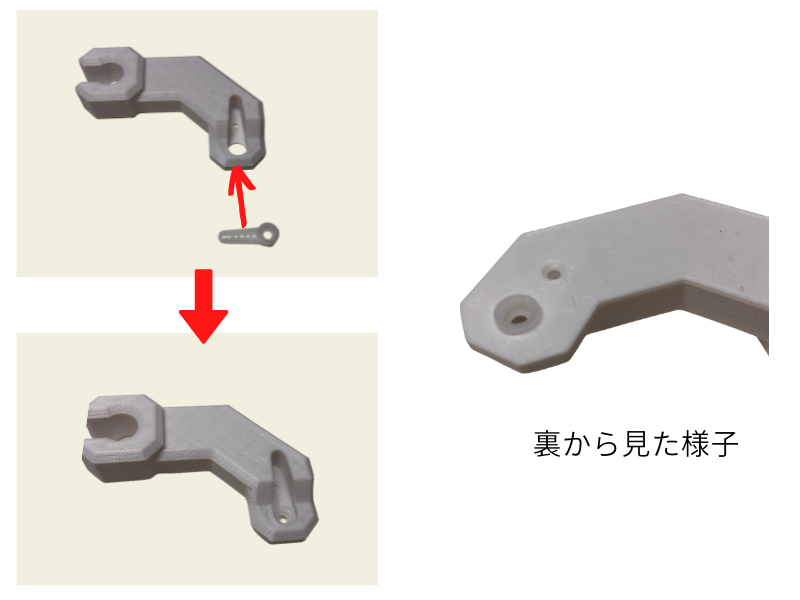
腕を準備します。サーボホーンを腕に取り付けます。サーボホーンの凸の部分を腕のパーツの穴に入れ込みます。
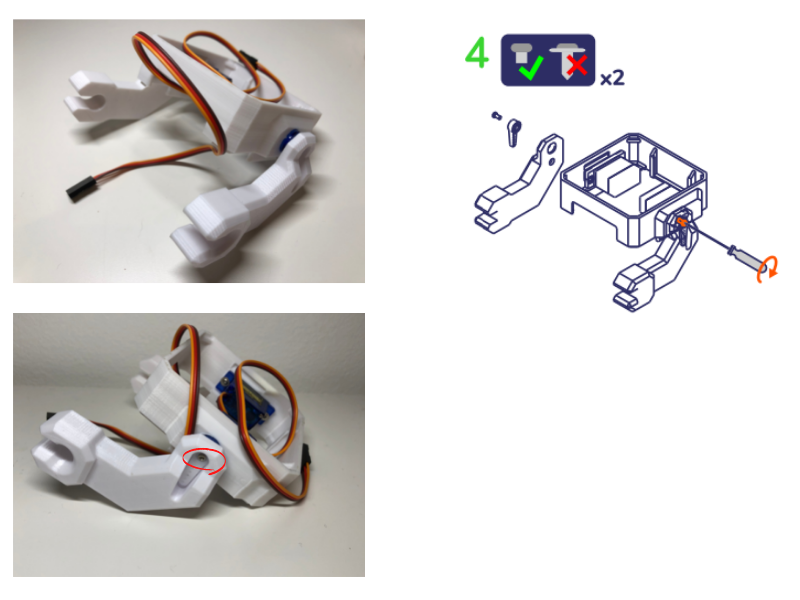
腕のパーツをを先ほどエクスパンダーに取り付けたサーボモーターに固定します。
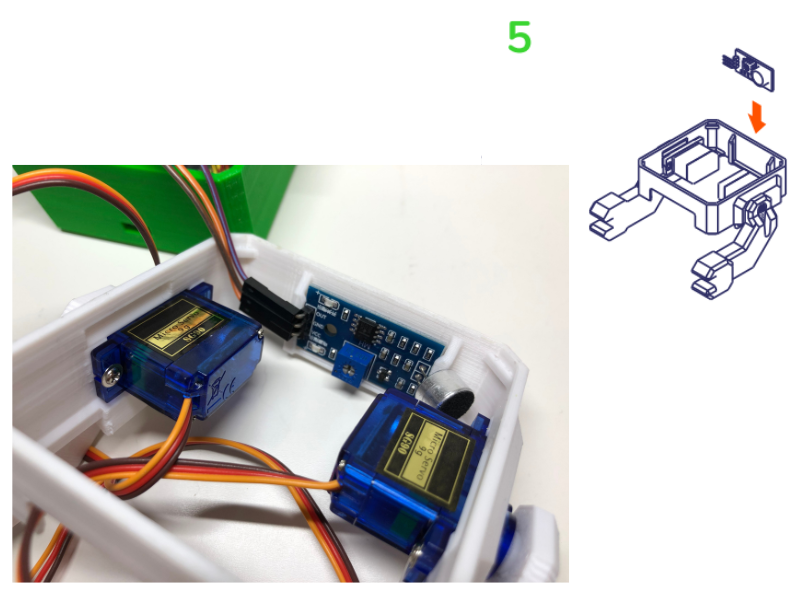
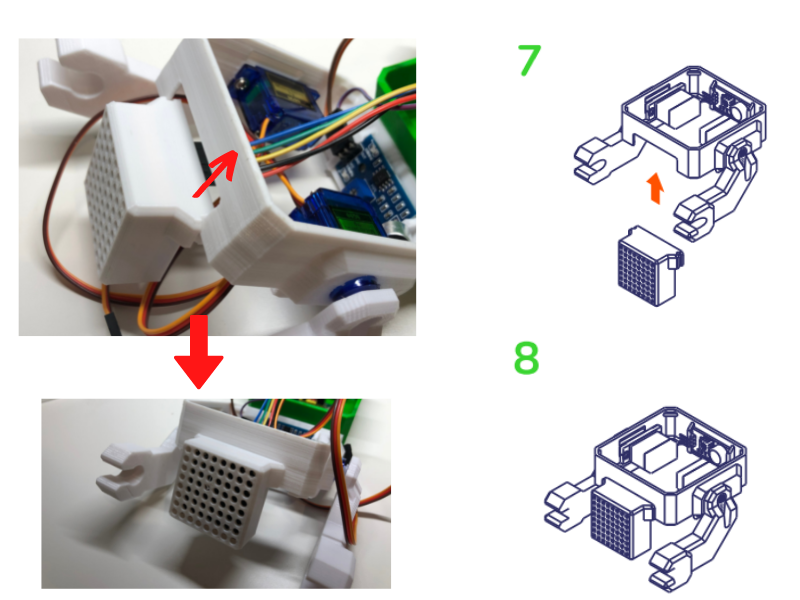
次に音センサーもエクスパンダーに固定します。
LEDディスプレイをホルダーに格納します。
ホルダーをエクスパンダーに取り付けます。溝がついているので、お互いの溝を合わせてからスライドさせて固定します。
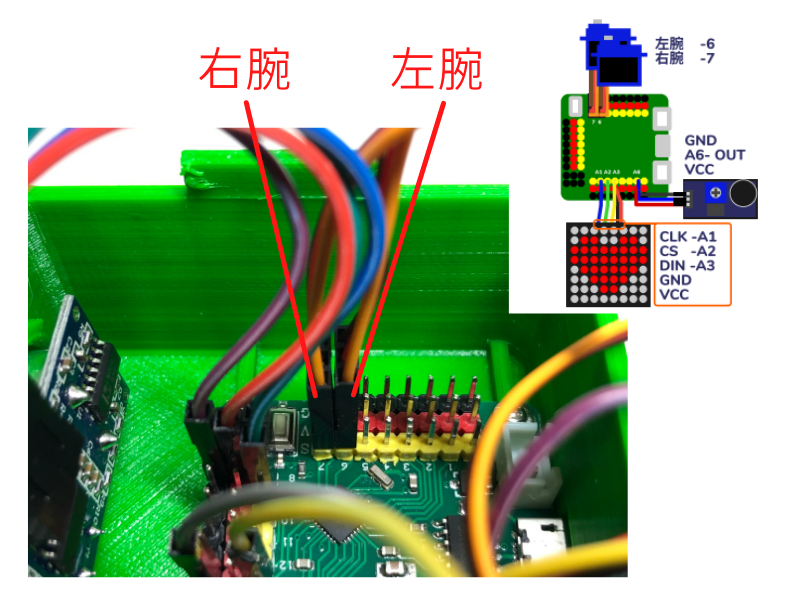
腕のサーボモーターの配線をします。左腕をCPUボードの6番、右腕を7番のピンにつなげます。オレンジ色のケーブルをCPUボードの黄色いライン、茶色を黒のラインに合わせてソケットをピンに差し込みます。
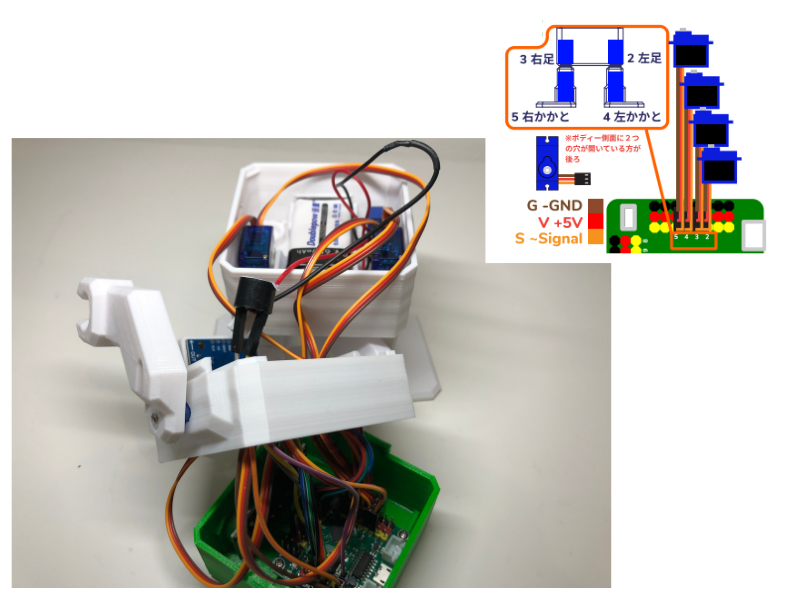
これで拡張セットの部品はすべて取り付け完了です。最初に外したケーブルを戻していきましょう。ケーブルはエクスパンダーを通してCPU ボードに取り付けていきます。まず足のサーボモーターのケーブルです。下の図の通りつなげていきます。
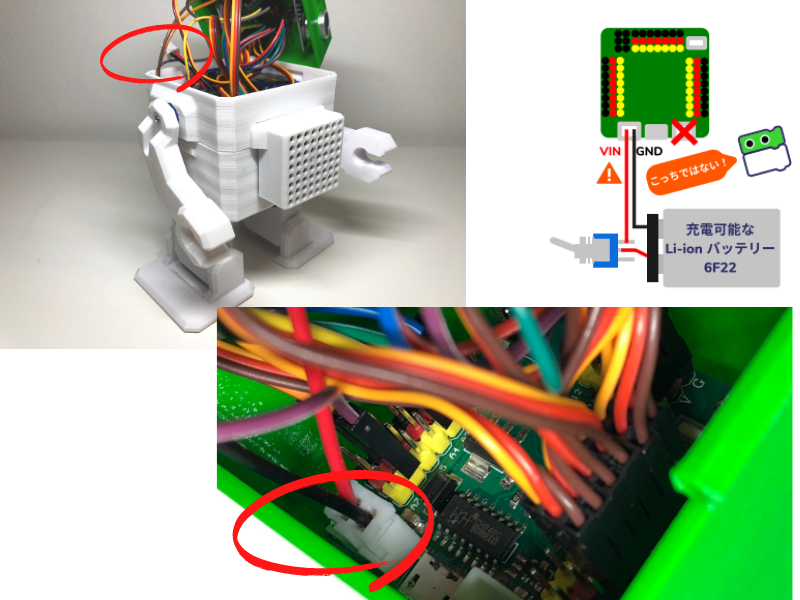
次に電源ケーブルと、ブザーです。この写真ではブザーについては場所を固定していませんが、固定する場合、ボディーの右の底面にブザーを固定し、配線します。電源ケーブルは若干短いので少し取り付けに苦労するかもしれません。コネクターが刺さる箇所が2か所あるので、取り付ける場所を間違えないよう注意してコネクターをつなげます。
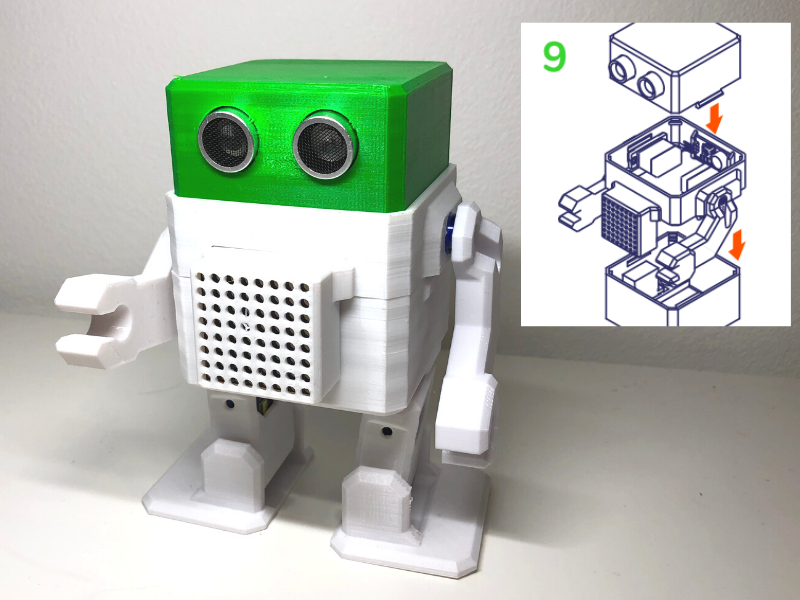
エクスパンダーを頭のパーツとつなげて完成です。
おめでとうございます。完成です。最後にサンプルプログラム紹介します。
音に反応して様々なアクションを行うサンプル (Arduino)
(2022年12月12日追記: 最新の Arduino 用 OttoDIYLib ライブラリではこのサンプルが利用している一部機能が含まれなくなりました。このサンプルを動かすためには、OttoDIYLib を次からダウンロード、Anduino で使えるようにしてください。
https://github.com/ROBOT-ICHIBA/OttoDIYLibClassic/archive/refs/heads/master.zip
)
実際に動いている様子
Otto のプログラムの Arduino IDE での実行の仕方は次を参考にしてください。
「Ottoロボットのための Arduinoセットアップガイド」
Follow me!

