Otto DIY スターターキットを組み立てる(1) パーツの確認
ここでは Otto DIY スターターキットを実際に組み立てる過程を紹介したいと思います。
キットは 2021年12月15日時点の最新バージョン v13 + new PCB バージョンで説明します。ROBOT.ICHIBAよりお買い求めいただいたスターターキットは現在 12月15日現在すべてこのバージョンになります。
内容物の確認
まずはキットに同梱されているものを確認していきましょう。
キットは次のような透明のケースに梱包されて届けられます。

中には A4用紙1枚の組み立て方マニュアルが同梱されています。ROBOT.ICHIBA から購入された場合、さらにこの組み立てマニュアルの日本語訳も添付されています。
中に入っているパーツを確認していきましょう。まず 3Dプリンターで出力されたロボットのボディーです。

左上の緑のパーツが頭、左下が胴体、右上が足のパーツで右下は地面と設置する足のかかと部分のパーツになります。
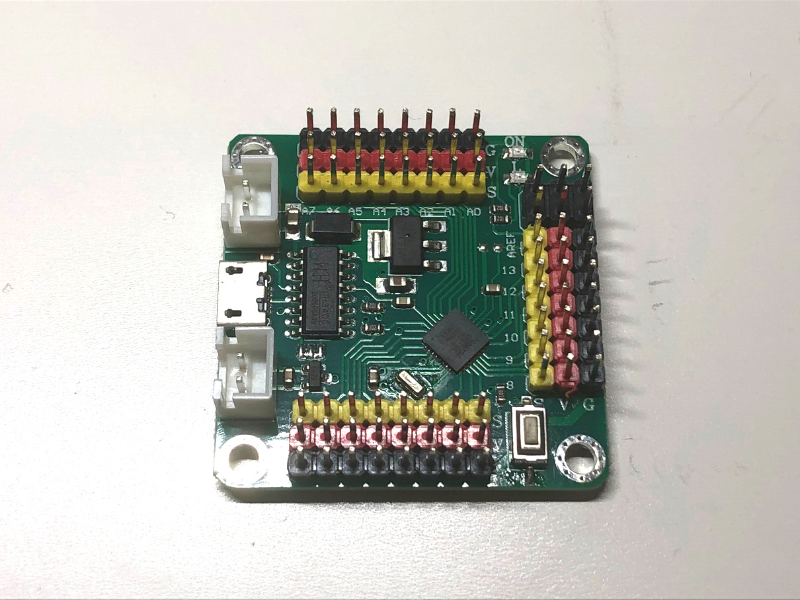
続いてロボットの頭脳となる CPU ボードを確認しましょう。最新の new PCB バージョンよりサーボモータを制御するボードと CPU 部分が一体設計となり、シングルボードでの制御を実現しています。CPU ボードは静電気保護のため銀色の袋に入った状態で同梱されています。
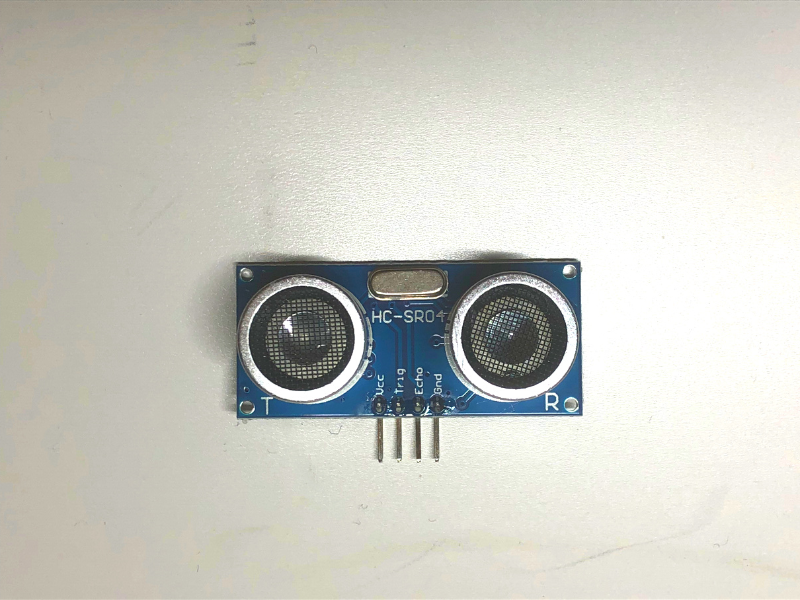
他のパーツも見ていきましょう。丸い筒が2つ見えるパーツは超音波センサーです。これは Otto の見た目上の目の部分に取り付けられ前方の障害物をとらえることを可能にしています。
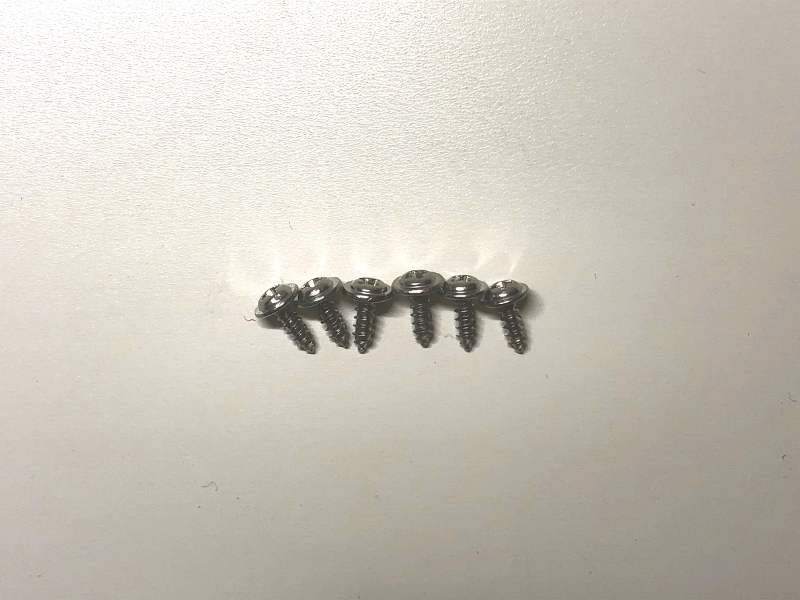
木ネジが6本同梱されていることも確認ください。
サーボモーターは4つ同梱されています。

それぞれ袋から取り出して中身を確認しますと、サーボモーターに本体に加え、駆動軸に取り付けるサーボホーン(白い部品)とネジが3本(木ネジ2本 + 短いネジ 1本) も袋の中に入っています。

Ottoは音も発生することができます。音の発生にはパッシブブザーが採用されています。次がブザーのパーツです

V13 から採用になった充電可能なバッテリーについても確認ください。一見普通の電池のように見えますが、電池の底の部分に USB コネクターをさせる箇所があり、ここにUSBケーブルをつなぎ、給電いただくことで充電することができます。

組み立てに必要なドライバーもキットに同梱されています。ただハンドル部分が大きくないためか、力をいれづらく、わたしはネジをだめにしてしまいそうなことが何度かありました。ご自身で使い慣れているドライバーがあればそちらをお使いいただく方が良いかもしれません。ただ一部作業で柄の長いドライバーでなければ取り付けることができないネジがあり、このネジの取り付け作業においてはこのドライバーは重宝します。

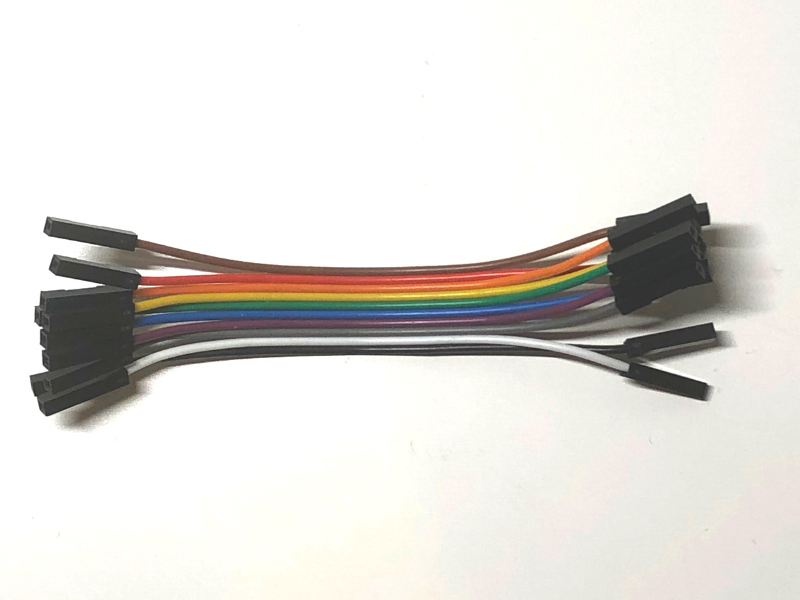
次はセンサー、ブザーを CPU ボードとつなげるためのケーブルです。6本必要なのですが、予備も含めて少し多めに入っています。
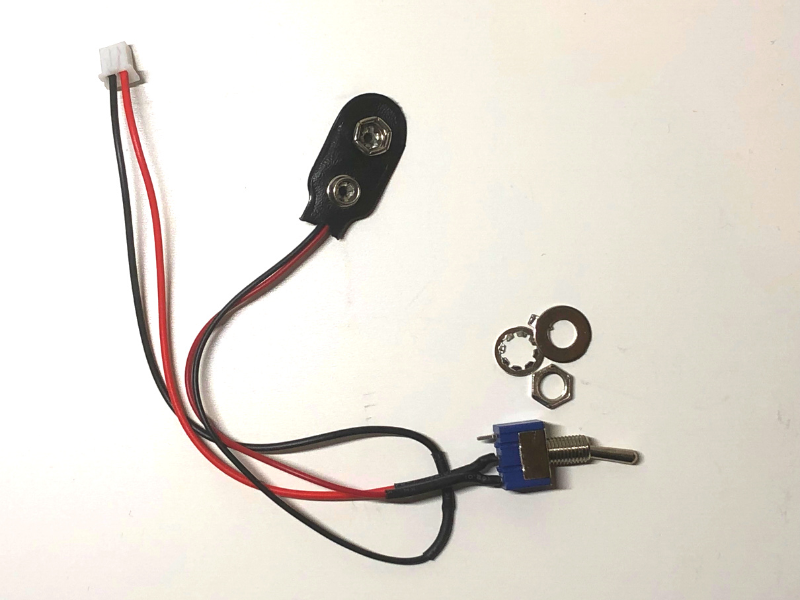
次は電源スイッチとこれをボディーに固定するネジです。少しアナログな感じのスイッチでおもむきがありますね。
最後に USB ケーブルです。PCからプログラムをロボットに転送する際、またバッテリーを充電する際に使います。

部品はすべてそろっていましたか? 次回は実際に組み立てていきます。
「Otto DIY スターターキットを組み立てる(2) 」に続く
Follow me!

“Otto DIY スターターキットを組み立てる(1) パーツの確認” に対して3件のコメントがあります。