Otto DIY スターターキット サーボモーターのセンター出しをする
ここではソフトウェア制御でサーボモーターのセンター出しをする方法をお伝えします。
サーボモーターのセンター出しはいくつか方法が考えられる中で、ここでは Arduino IDE を使った方法を紹介します。
必要な機材
- PC ・・・ Windows, Mac, Linux のいずれかのマシンをご用意ください。また PC とは USB ケーブルで接続しますので、USB の空きポートが一つ必要です。
- Otto DIY スターターキットに含まれている次のパーツ
- CPUボード
- USB ケーブル
- サーボモーター x 4

PC へのソフトウェアのインストール、セットアップ
Arduino IDE ツールをインストールします。Arduino IDE は Arduino などのマイコン向けのプログラミングができる開発環境です。Otto DIY ロボットの頭脳にあたる CPU ボードは Arduino 互換の設計となっており、Arduino IDE で開発したコードで Otto DIY のロボットも動かすことができます。
Arduino IDE をオフィシャルサイトよりダウンロード、インストールします。
Arduino オフィシャルサイト 、ソフトウェアダウンロードページ: https://www.arduino.cc/en/software

この記事を執筆している 2021年12月19日時点での最新の安定バージョンは 1.8.18 でした。ご自身のマシンの環境に合うインストーラをダウンロードして実行、インストールを完了させます。
次にUSBドライバーをインストールします。これは PC が Otto DIY ロボットの CPU ボードと USB ケーブル経由で通信ができるようにするために必要な作業になります。 Otto DIY オフィシャルサイトより、ご自身のマシンの環境にあうファイルをダウンロードします。
Otto DIY ソフトウェアダウンロードページ:https://www.ottodiy.com/software
- ページをスクロールダウンして USB Drivers のセクションまで移動し、ご自身のマシン環境に合うボタンをクリックします。

- Zip ファイルがダウンロードされてきますので、これを展開します。
- 展開されたフィルの中にあるファイルを実行します。
センター出し用のプログラムを Arduino IDE に読み込ませる
Arduino IDE に今回使うプログラムを読み込ませます。
- 次から プログラムをダウンロードします。https://github.com/ROBOT-ICHIBA/Otto-SetupAssist.git
- ダウンロードしたファイルを展開します。
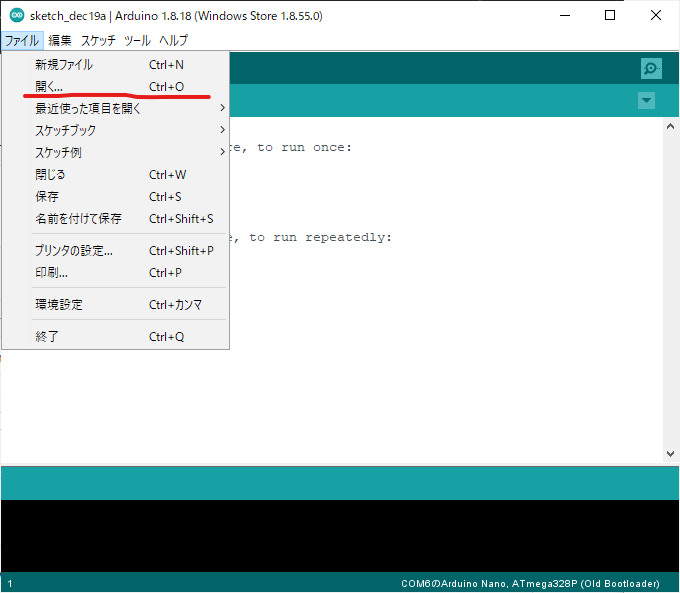
- 先ほどダウンロードした Arduino IDE を開きます。
- メニューから ファイル -> 開く... を選びます。
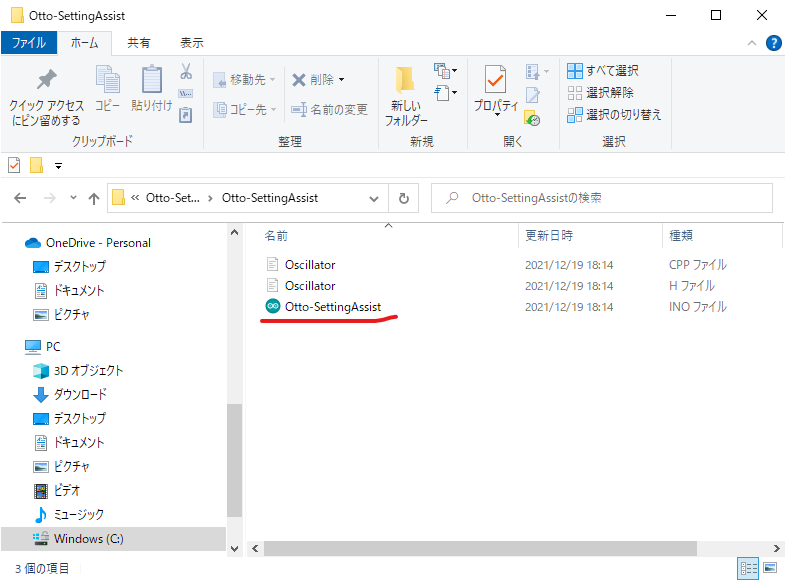
5. 先ほど展開したファイルの中 otto-SettingAssit の中にある Otto-SettingAssist.ino ファイルを選択し、開きます。
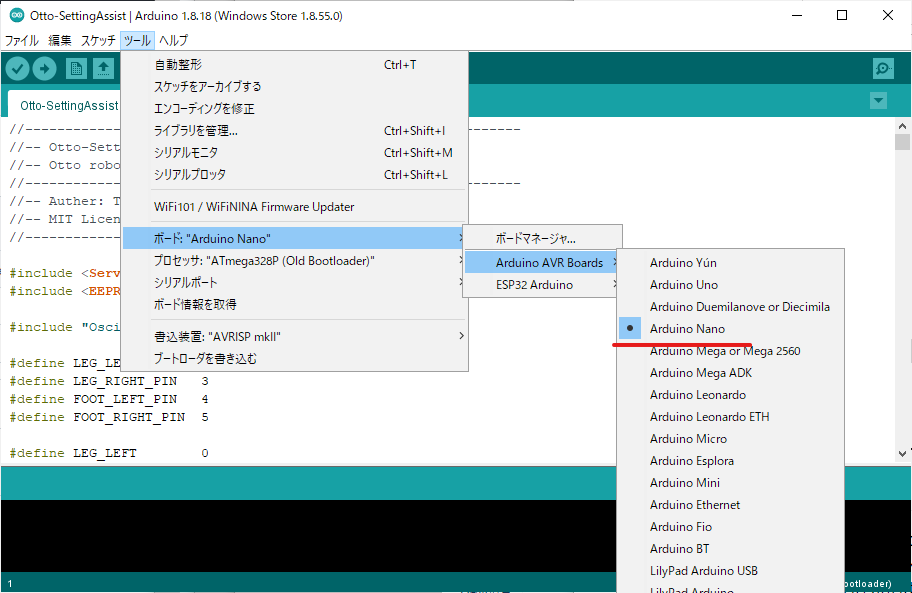
6. ツール設定を Otto DIY ロボットに合わせます。まず ツールメニューから ボードを選び Arduino AVR Boards の中の Arduino Nano を選びます。
これでソフトウェア側の準備ができました。次はハードウェアの準備をしましょう。
ハードウェアの準備
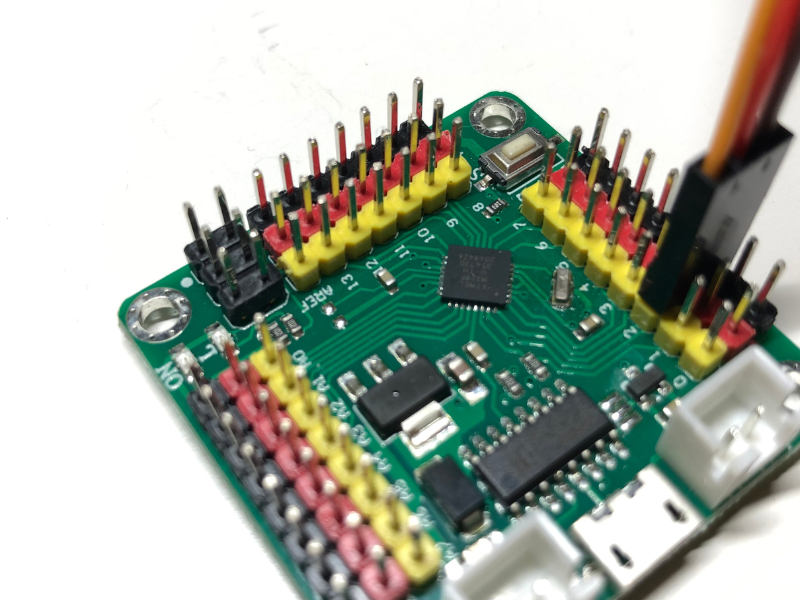
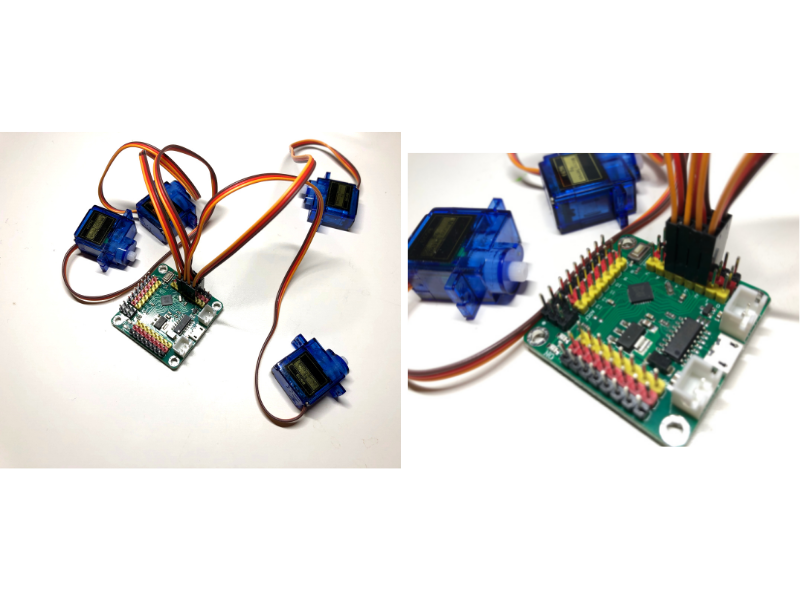
サーボモーターのケーブルを CPU ボードの ピン 2 番から 5番につなげていきます。サーボモーターのオレンジのケーブルを CPU ボードの黄色のラインに、赤が真ん中、茶色のケーブルを黒色のラインに差し込みます。2番ピンにサーボモータのケーブルを差したのが次のような状態です。
同じつなげ方で残りのサーボモーターを3番目から5番目までつなげます。
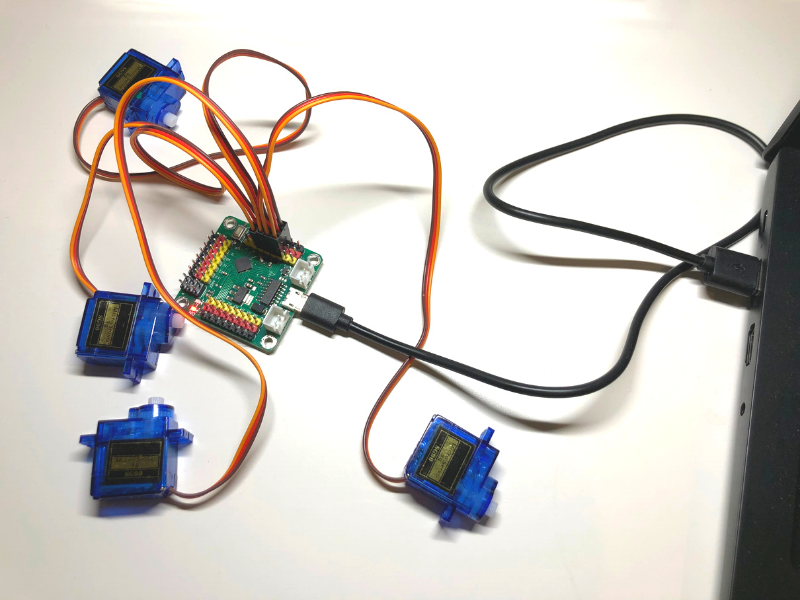
最後に CPU ボードと PC をUSBケーブルでつなげます。
センター出しを実行する
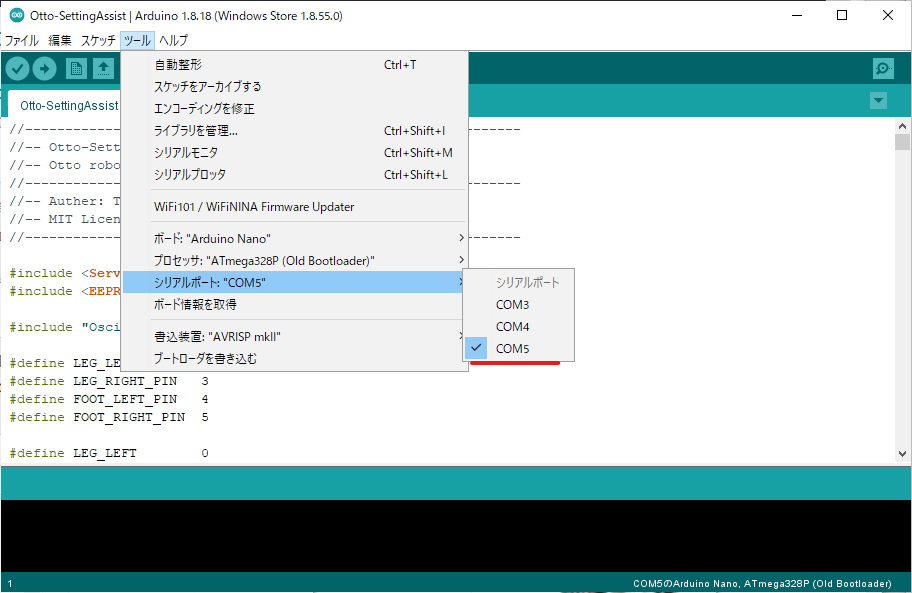
- Arduino IDE と CPU ボードをつなげます。 メニュー ツール から シリアルボートを開き、現れたシリアルポートから任意の一つを選びます。どのシリアルポートが接続した CPU ボードかは環境により異なります。一番最後に追加されたデバイスになるので、ほとんどの場合リストの一番最後になりますが、場合によってはこの後の作業がうまくいくまでいくつかシリアルポートを変えて試さなければならないかもしれません。
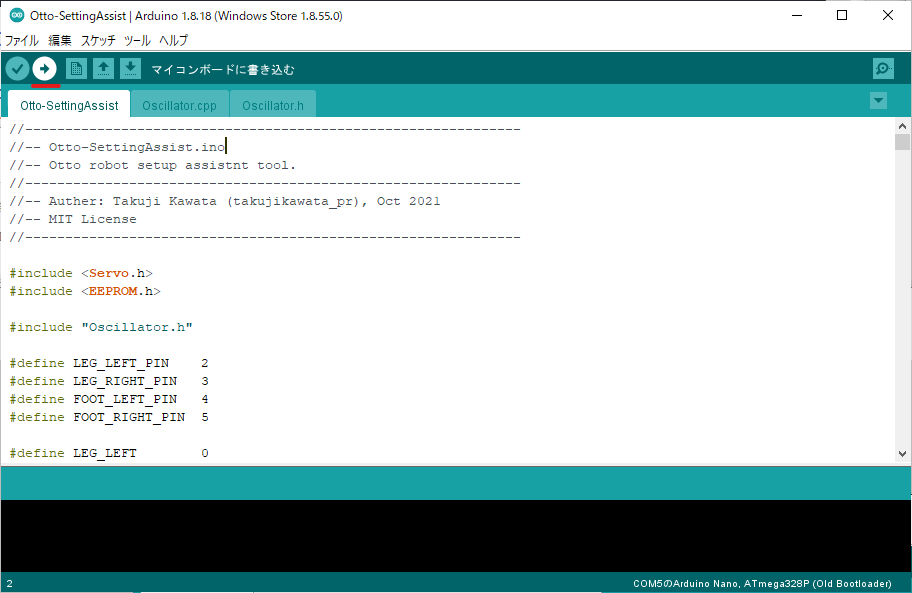
2. (→) のボタンをクリックします。プログラムが CPU ボードに書き込まれます。
3. うまくいくとウィンドウ下側に 「ボードへの書き込みが完了しました。」表示されます。オレンジ色の帯のエラーメッセージが現れた場合、何らかの問題があるということになります。シリアルポートを変えるなどしてもう一度試してみてください。

4. 書き込みがうまくいくと、サーボモーターは左右に15度ずつ回転させた後、センター位置で停止します。この状態で組み上げていけば、サーボモーターはセンター位置にある状態で組み上げていくことができます。サーボモータの左右15度の回転は次のように順番に実行されます。この動作を確認することで、サーボモーターの調子も確認することができるでしょう。(ここでは回転がわかりやすいようにサーボホーンをつけています。)
この回転動作は1回だけ行われ、そのあとはセンター位置でずっと止まっています。再度それぞれのサーボモーターがつながってちゃんと動作しているか確認したい場合、いったん USB ケーブルを抜いて、再度差し込む(これによりプログラムが再度最初から実行される)か、Arduino IDE の (→) ボタンを再度クリックします(これによりプログラムの書き込みが再度行われ、プログラムが最初から実行されます)
センター出しはこれで終了です。つないだケーブルはいったん全部外して、Otto DIY ロボットの組み立てを再開します。
Follow me!


“Otto DIY スターターキット サーボモーターのセンター出しをする” に対して1件のコメントがあります。