Otto DIY 拡張セット「スマート」を組み立てる
ここでは Otto DIY ロボットの拡張セット「スマート」の組み立て方を確認していきます。
部品の確認
パッケージの中身を確認していきましょう。
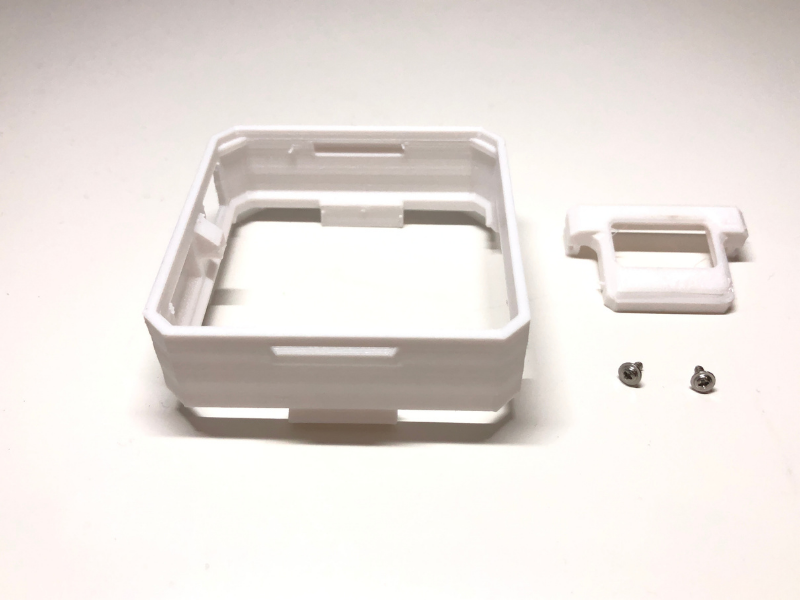
まずは拡張パーツを取り付けるためのエクスパンダー(写真左)と OLED ディスプレイを固定するためのホルダーがあります。また各パーツを固定するためのネジも付属されています。
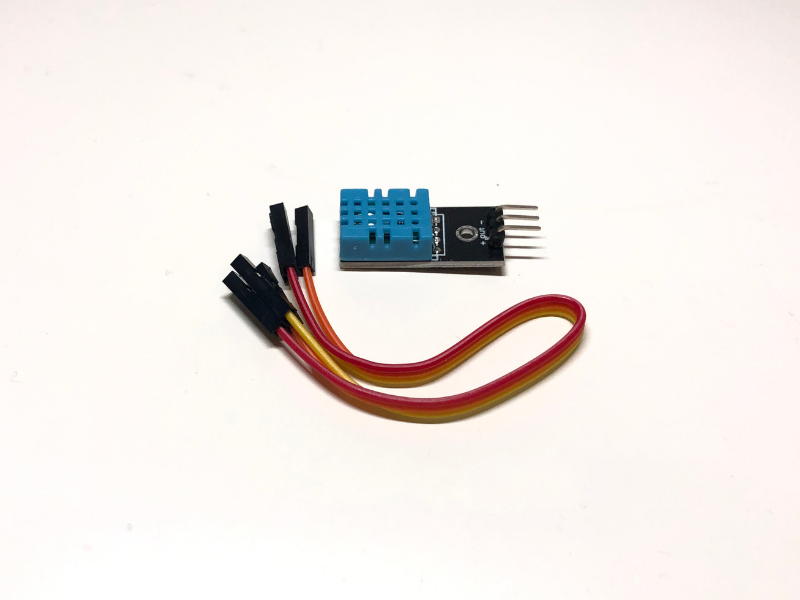
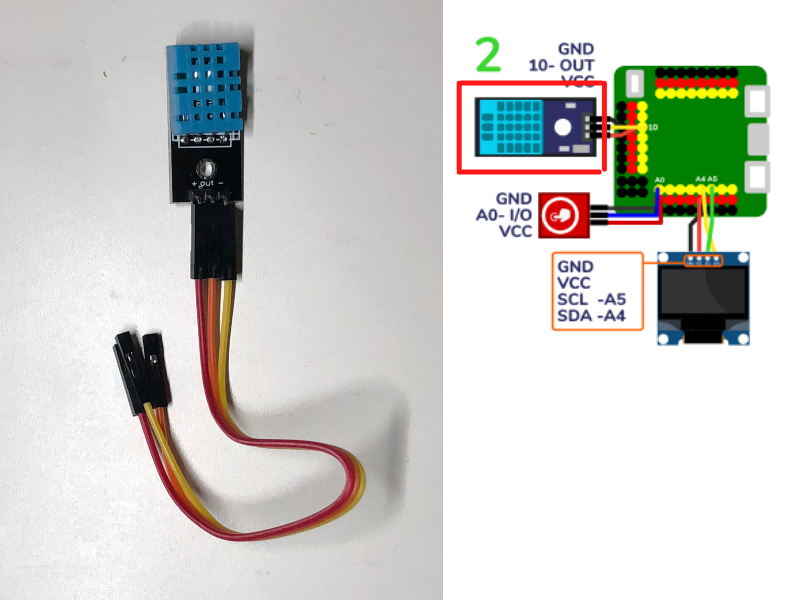
温度湿度センサーとジャンパーケーブル
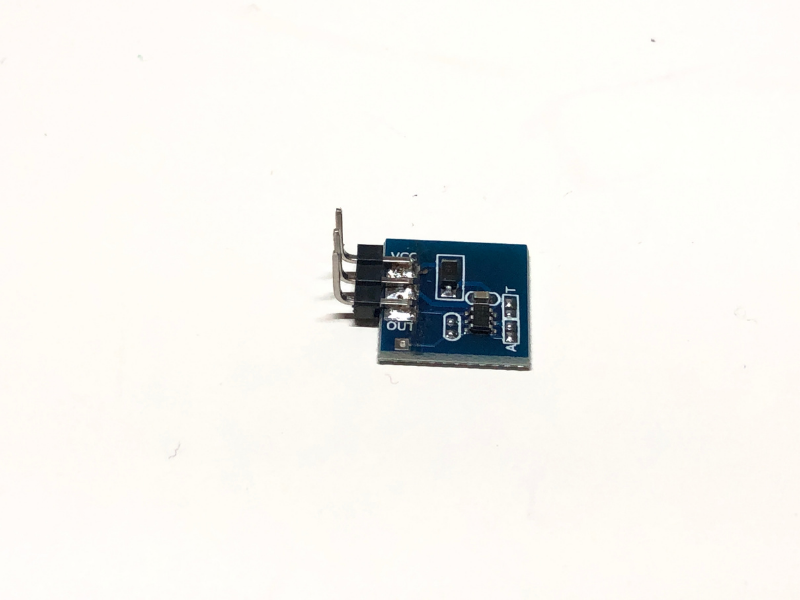
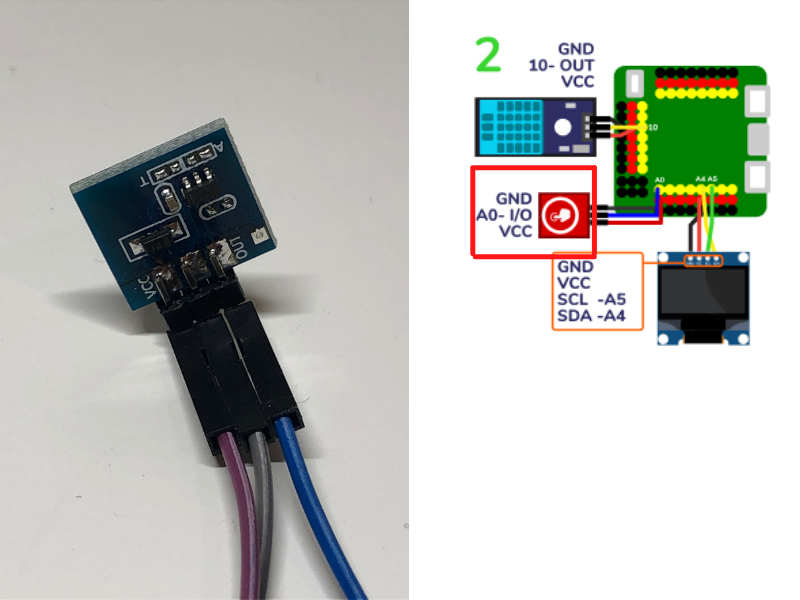
タッチセンサー
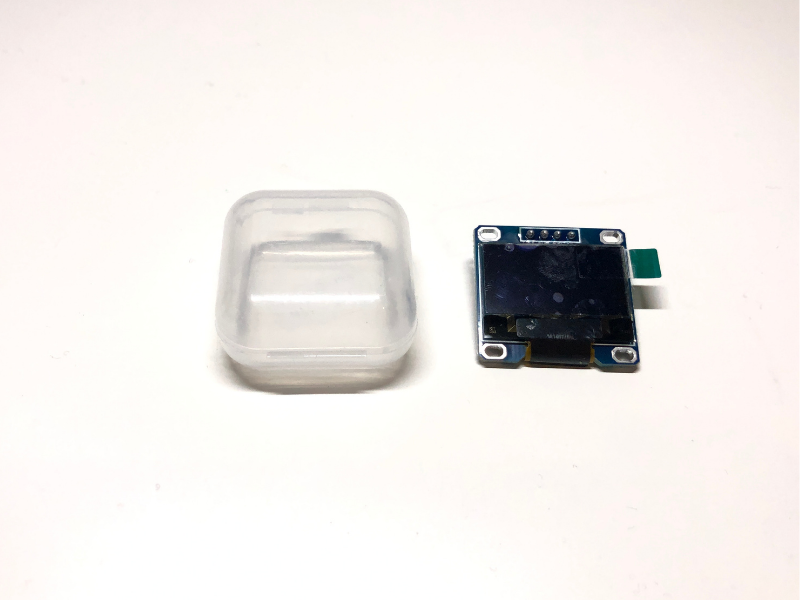
OLED センサー、写真左の透明カプセルの中に入っています
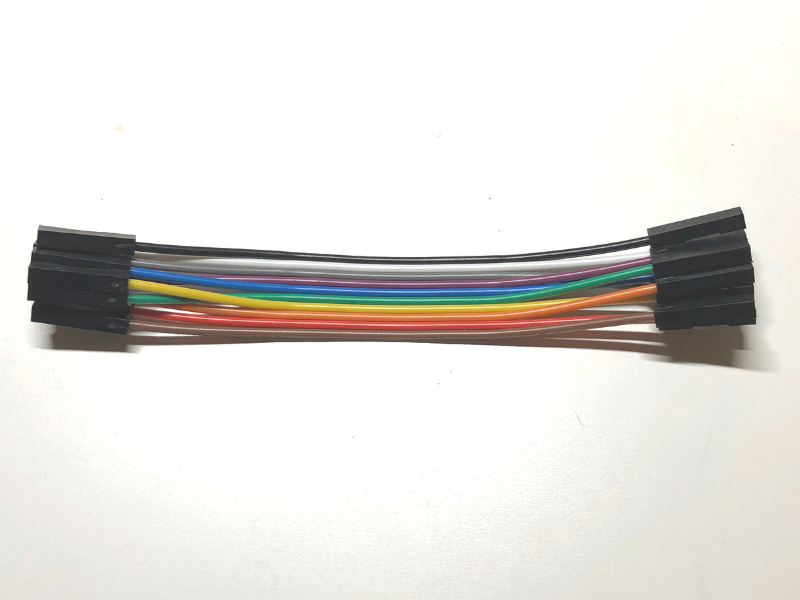
最後に追加のジャンパーケーブルです
一通り含まれていることが確認出来たら組み立てていきましょう
各パーツを組み上げる
組み立てはスターターキットが完成している状態から説明していきます。スターターキットとその組み立て方については次を参考にしてください「Otto DIY スターターキットを組み立てる(1) パーツの確認」
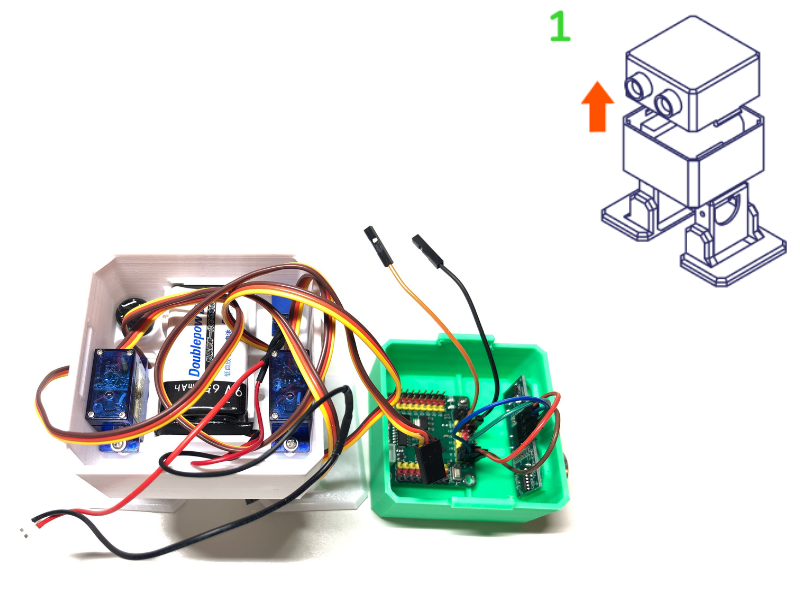
まずはスターターキットの頭を胴体部分から外します。胴体と頭の間にエクスパンダーを挿入する必要があるので、CPUボードにつながっているサーボモーターの配線と、電源スイッチ、ブザーの配線はいったん外します。
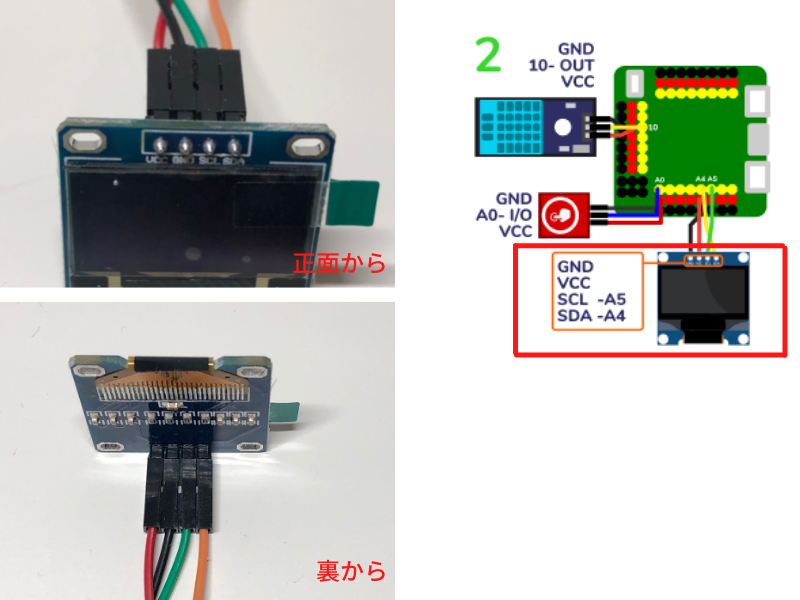
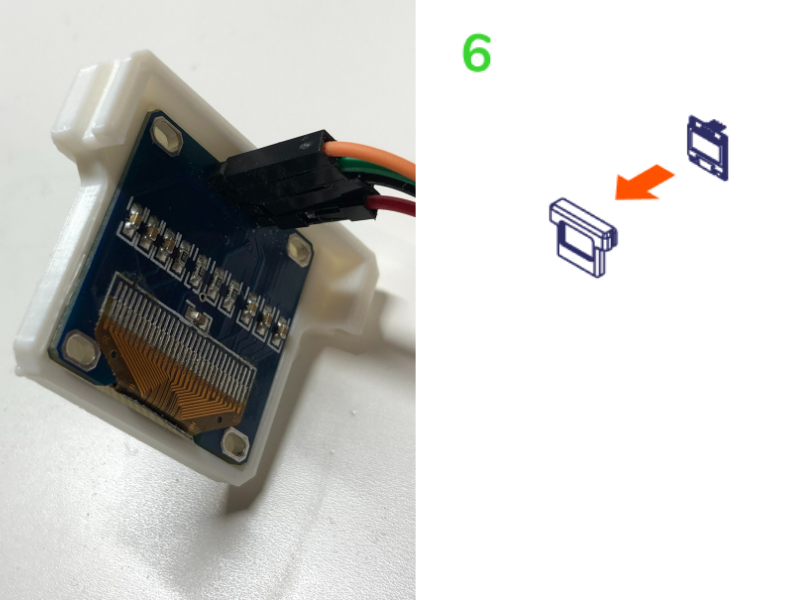
それぞれのパーツの準備をしていきます。まずは OLED ディスプレイです。それぞれのピンにジャンパーケーブルをつなげます。つなげるジャンパーケーブルは色はこれと完全に一致している必要はありませんが、どの色のケーブルをどのピンにつなげたかあとでわかるようにしておいてください。
次に温度、湿度センサーです。同じくジャンパーケーブルをピンにつなげていきます。こちらもどの色のケーブルをどのピンにつなげたかあとでわかるようにしておきます。
タッチセンサーも同じ作業を行います。
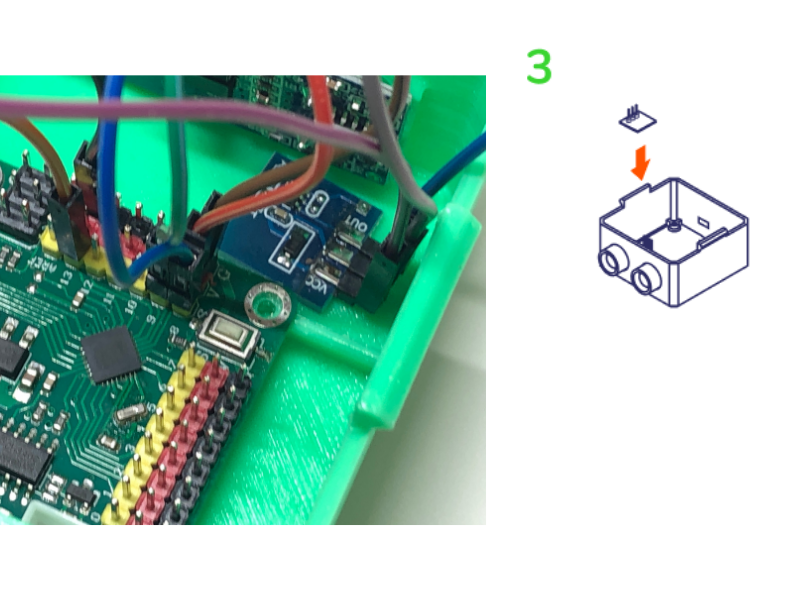
タッチセンサーを頭のてっぺん裏側に取り付けます。取り付けるといっても取り付け位置があるわけでもネジで固定できるようになっているわけでもありません。タッチセンサーは頭のパーツに接触されていれば人の手が頭をタッチしたときのその静電気の変化を検知してタッチされたことを検出してくれます。わたしはセンサー面に両面テープを張ってセンサーを固定しました。この状態でもちゃんと反応してくれます。(写真右上に見えているのがタッチセンサーです)
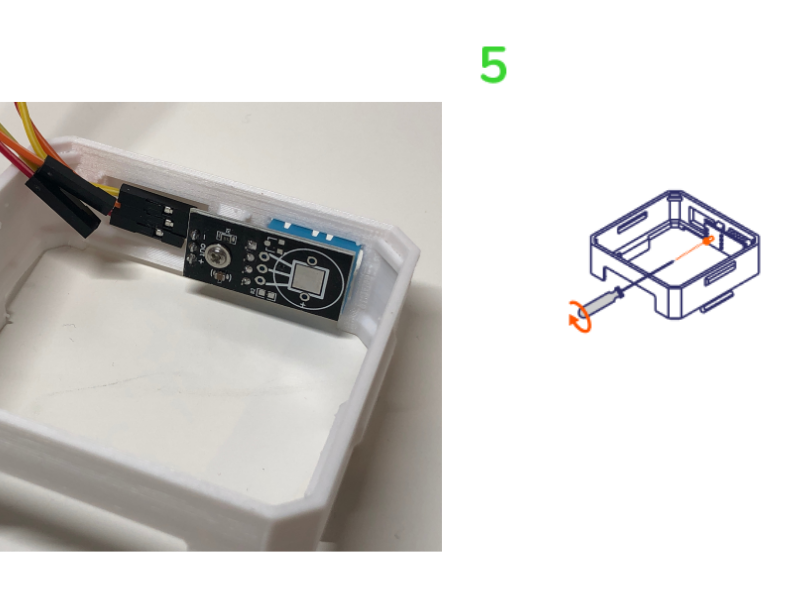
次に温度、湿度センサーを取り付けます。センサー部分が外気に触れられるように、穴が開いているので、そのにセンサーをはめ込んでおさめます。
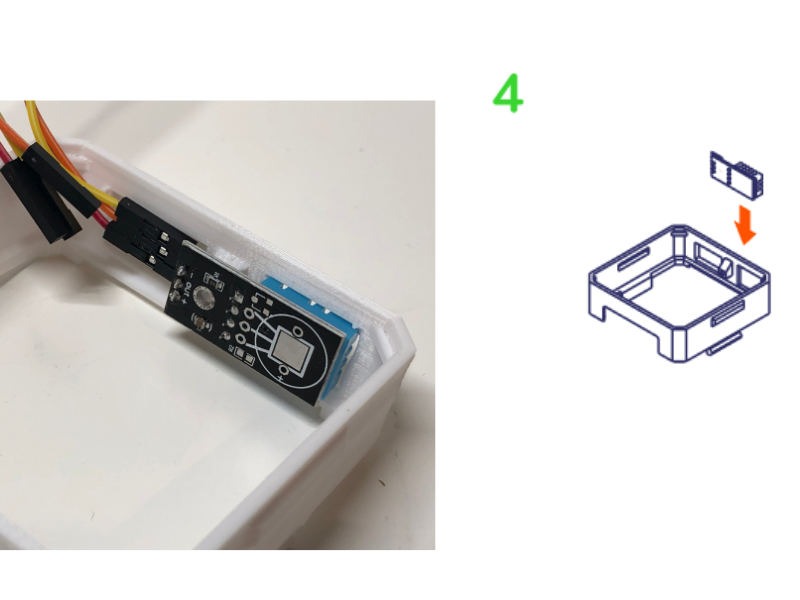
センサーをねじ止めします
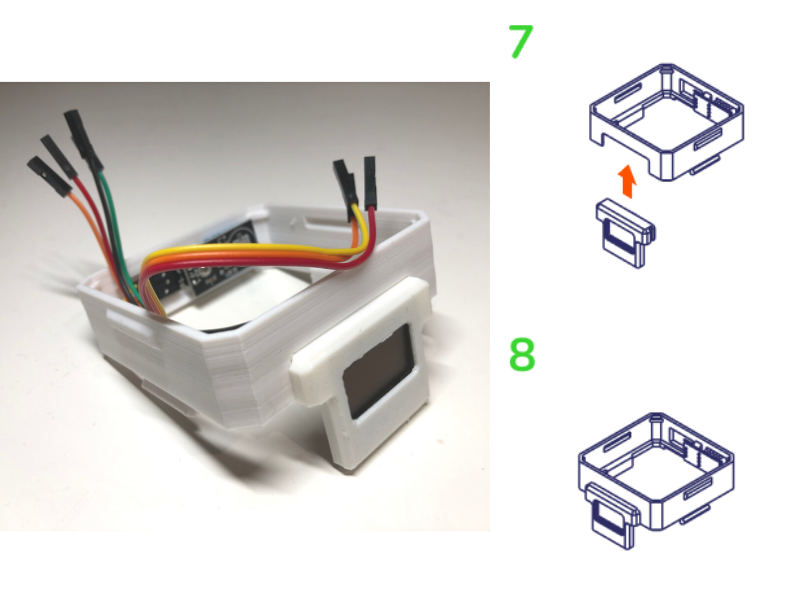
OLED ディスプレイをホルダーに収めます
ホルダーをエクスパンダーに取り付けます。溝がかみ合うようになっているので、それぞれの溝を合わせて、スライドさせてセットします。
以上で各パーツの組み込みは完了です。最後に配線を完成させます。
配線を行い、完成させる
電源ケーブル、サーボモーターのケーブル、ブザーのケーブルをそれぞれエクスパンダーを経由してCPUボードにつなげます。
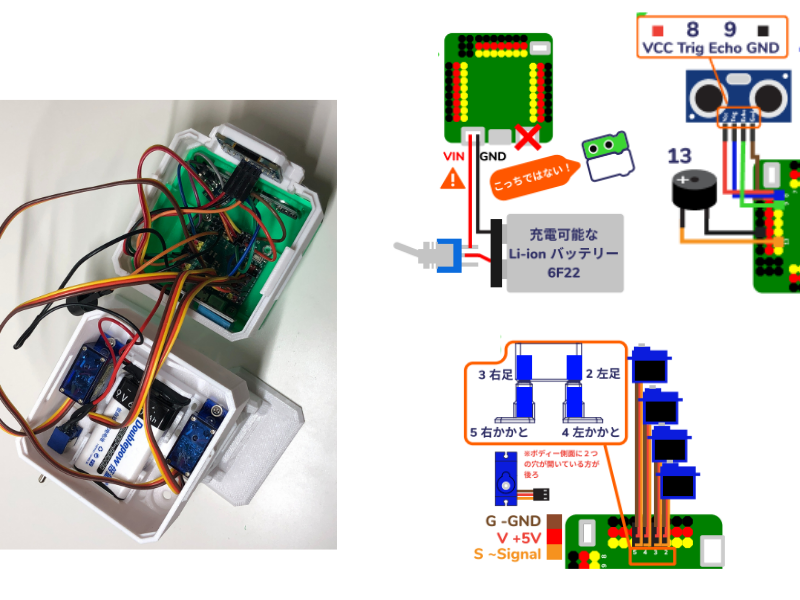
お疲れさまでした!完成です。

サンプルプログラムなどは次にも用意してあるので是非試してみてください。
https://github.com/ROBOT-ICHIBA/Otto-Sample-Apps/tree/main/arduino_ide/smart_expansion_robot
うまくいかないこと、疑問、質問などあれば是非 Facebook コミュニティーまたは ROBOT.ICHIBA のサポートまでお問い合わせください。
- Otto DIY ロボット日本コミュニティー : https://www.facebook.com/groups/4442275079224263
- ROBOT.ICHIBA サポート: support@robot-ichiba.jp
是非、Otto DIY ロボットで様々なチャレンジをしてみていただければと思います!
Follow me!